Lo scopo principale di un inseguitore solare o Solar tracker è quello di massimizzare l’efficienza del dispositivo ospitato a bordo, solitamente si tratta di pannelli solari , abbeveratoi parabolici , riflettori Fresnel , lenti o specchi di un eliostato.
Precisamente, per i sistemi fotovoltaici a schermo piatto , i tracker vengono utilizzati per ridurre al minimo l’ angolo di incidenza tra la luce solare in entrata e un pannello fotovoltaico. La riduzione di questo angolo aumenta quindi considerevolmente la quantità di energia prodotta. La scelta di opzionare un sistema di inseguimento dotato di una sola asse è più che fondata, in quanto impiegare un’altra asse (Y), avrebbe significato conseguire a costi maggiori di installazione con un ritorno in produzione di energia talmente impercettibile e minimo che già preimpostando l’asse x parallela ai meridiani, quindi con un’oscillazione del pannello longitudinale (da est a ovest), la quantità di energia prodotta con una sola asse, sarebbe stata sostanzialmente uguale a quella prodotta con l’ausilio di una seconda asse.
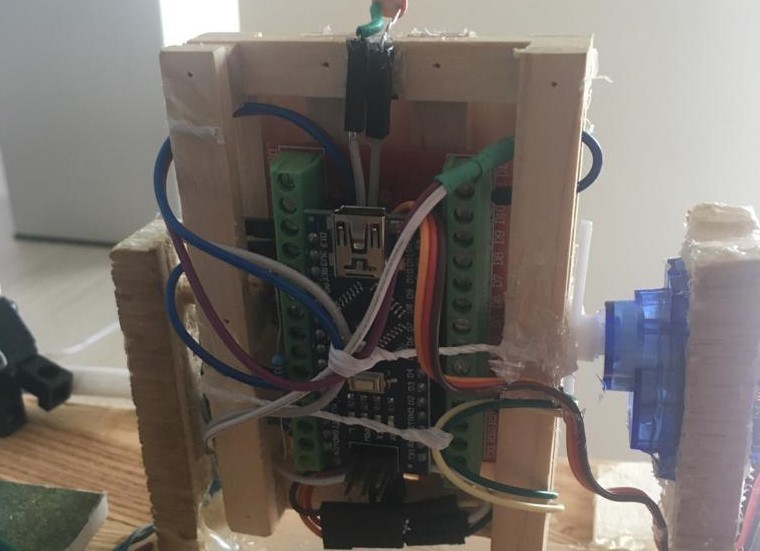
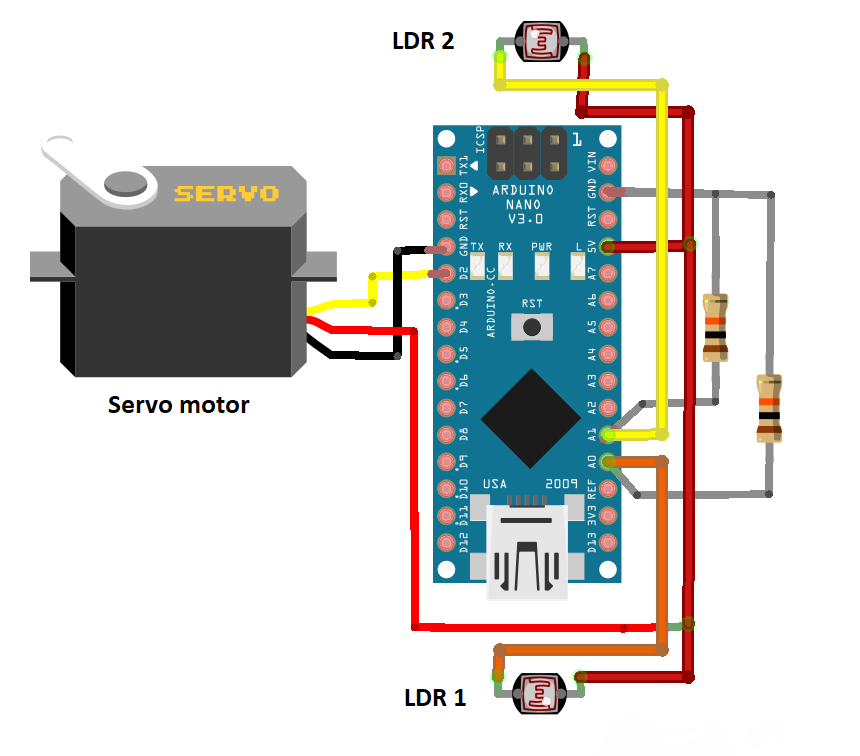
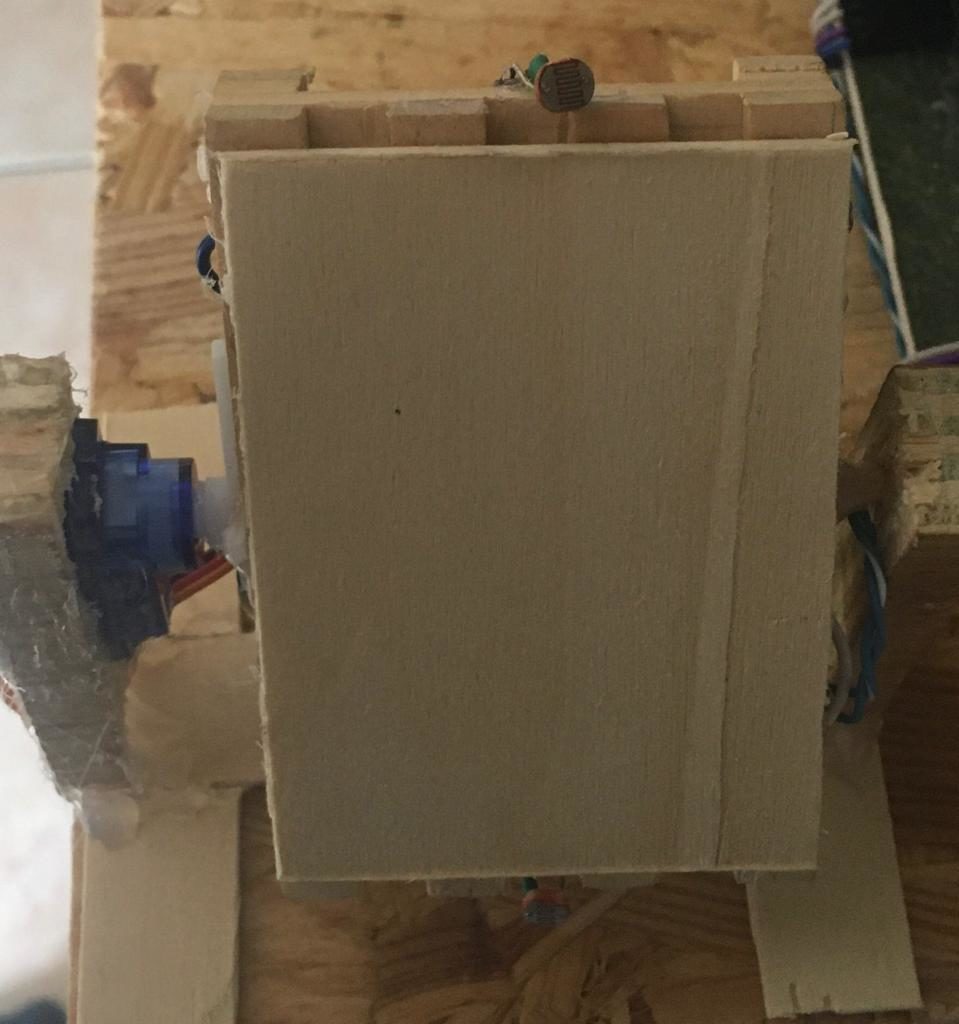
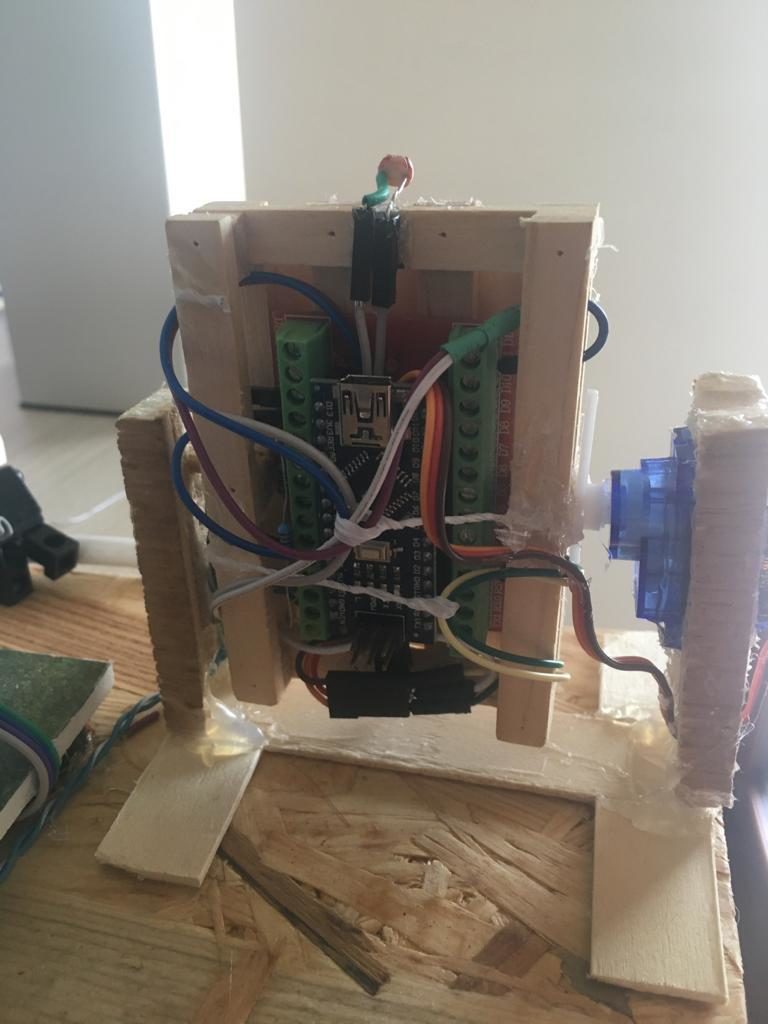
A seguire il circuito elettrico del nostro prototipo il cui micro-controllore corrisponde a un Arduino Nano, il quale servendosi di due fotoresistori, ha la facoltà di indirizzare il Servo Motor verso la direzione più vantaggiosa per la produzione di energia…
A seguire il codice da caricare sul nostro Arduino:
//www.vincenzonet.it
#include <Servo.h>
Servo sg90;
int LDR1 = A0; //connect The LDR1 on Pin A0
int LDR2 = A1; //Connect The LDR2 on pin A1
int error = 25;
int servopin = 2; //You can change servo just makesure its on arduino's PWM pin
int initial_position = 90;
void setup()
{ pinMode(11, OUTPUT);
digitalWrite(11, HIGH);
initial_position = 90;
sg90.attach(servopin);
pinMode(LDR1, INPUT);
pinMode(LDR2, INPUT);
sg90.write(initial_position);
//Move servo at 90 degree
delay(2000);
}
void loop()
{
int R1 = analogRead(LDR1); // read LDR 1
int R2 = analogRead(LDR2); // read LDR 2
int diff1= abs(R1 - R2);
int diff2= abs(R2 - R1);
if((diff1 <= error) || (diff2 <= error)) {
} //www.vincenzonet.it
else {
if(R1 > R2)
{
initial_position = --initial_position;
}
if(R1 < R2)
{
initial_position = ++initial_position;
}
}
if(initial_position>140){
initial_position=140;
}
if(initial_position<30){
initial_position=30;
}
sg90.write(initial_position);
delay(100);
}
//www.vincenzonet.it
Ecco dove scaricare il materiale relativo al Solar_tracker in file zip dove poter trovare foto del circuito e sketch…
D’Ambrosio Vincenzo Classe 2006
Iscriviti alla nostra newsletter!




ALTRO...
Braccio Robotico con Arduino e GUI in Python
GARBADOL Project
Centralina per un Impianto di Termoventilazione con un TTGO ESP32